電動客車CAN收發器亞損壞故障排查與檢修
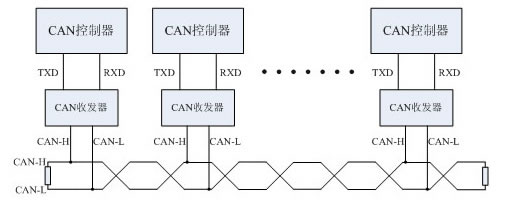
CAN收發器是CAN總線通訊的信號傳遞通道,負責將單片機的TTL電平轉換為CAN總線電平,是CAN標準——ISO11898系列中最基本的物理層芯片。如果CAN收發器不正常或者失效,這個節點的通訊將受到致命的影響。
在電動客車的運營中,工程師最怕現場出現“時好時壞”的情況,如果CAN節點徹底不通訊,則很有可能是收發器損壞,那進行更換即可;如果車輛運行時出現故障,而將故障節點拆下來測試時,卻又可以正常工作,這就非常頭疼。
電動客車與傳統客車不同,其是使用電池、電容來存儲能量,然后通過逆變成交流,帶動電動機驅動車輛。當客車加速或者減速時,逆變產生巨大電流變化,而形成強磁場干擾,通過動力線纜耦合到附近CAN總線,會使CAN收發器的損壞率有所上升。而有些時候,CAN收發器是工作在亞損壞狀態,就是我們所說的“時好時壞”現象。按照通用的測試標準是很難發現并標定故障,無法及時在車輛檢修時排除故障節點。前不久某電動客車廠就遇到了一個亞損壞的案例,廣州致遠電子有限公司派出工程師,協助客戶使用CANScope-Pro專業版CAN總線分析儀成功定位亞損壞CAN收發器的原因,并制定車輛檢修標定準則,及時排除亞損壞的CAN收發器。為電動客車穩定運行保駕護航。

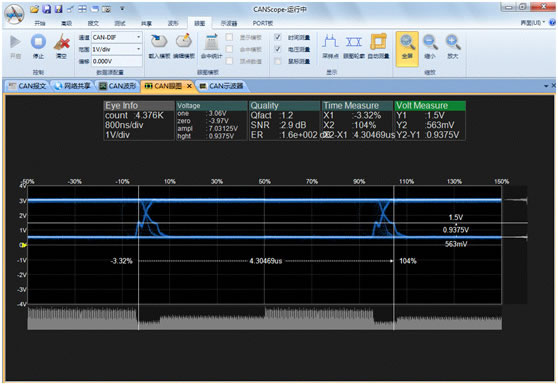
眼圖是邏輯脈沖的重疊,用于測量信號質量。通俗點,就是把所有的“0”和“1”疊加到一起,觀測,信號畸變程度的一種統計方法。
例如CAN-bus的ISO11898-1規定顯性邏輯的差分輸入電壓要大于0.9V。如圖所示,如果要讓CAN總線正常通信,眼圖中灰色區域的電平最小值不能小于0.9V。圖中使用CANScope的硬件眼圖功能測量到的眼高為1.75V,是符合通訊要求的。

對電動客車上正常的CAN節點做眼圖,可見沒有明顯畸變。

對故障CAN節點做眼圖,可見故障節點雖然目前可以通訊,但是波形已經發生畸變。超過顯性閥值0.9V的寬度已達4.3us,即表示此時故障節點發出的顯性電平(邏輯0)的寬度為4.3us,與標準的4us已經偏差0.3us。
可見在溫度變化的情況下,這個位寬度會增大,最后導致總線波特率異常,所有節點都會被其干擾,由于程序中做了自恢復功能,所以這個故障節點無法退出總線,一直在干擾總線,最終導致整車癱瘓。
針對客戶整改目標,致遠電子CANScope-Pro分析報告中提出了3個徹底解決措施:
- 1.客戶后續研發產品的CAN總線接口均采用CTM1051隔離收發器模塊,實現電源和信號隔離限幅,防止強干擾信號形成直流耦合回路,導致收發器損壞;
- 2.目前的車輛全部更換CAN收發器為更新型的TJA1051T,其耐壓58V,靜電等級為8KV(無需加TVS管),而老收發器PCA82c250耐壓僅為36V,靜電等級僅為2KV;
- 3.程序中對于一直錯誤要進行極限處理,不可一直可恢復,如快速自動恢復20次后,延長恢復時間到秒級,保證其他節點可以發出數據。如果連續錯誤30秒,將停止自恢復,避免把整車其他節點拖死;
- 4.車輛的日常維護檢修中,使用CANScope進行眼圖分析,排查已經進入亞損壞的收發器,避免車輛運行過程中的故障。

